 A3035 Implantable Inertial Sensor (IIS) Manual
A3035 Implantable Inertial Sensor (IIS) Manual
© 2020-2026 Kevan Hashemi,
Open Source Instruments Inc.© 2021 Jordan Kaufmann, Open Source Instruments Inc.
| Description |
| Versions |
| Coordinates |
| Battery Life |
| Modifications |
| Design |
[03-OCT-24] The Implantable Intertial Sensor (IIS, A3035) is a wireless accelerometer and gyroscope that may be implanted beneath the skin of a small mammal or attached to the exterior of a fish. The IIS communicates using our Subcutaneous Transmitter (SCT) telemetry system. The design of the IIS was motivated by a desire to measure the movement of freely-swimming fish in a water tank, but the IIS will work equally well measuring the dynamics of freely-moving rats and mice. The ISS is equipped with a 30-mm loop antenna insulated in silicone. The sensor body is encapsulated in epoxy and silicone. To attach the IIS to a fish, we wrap it in a custom-made rubber sleeve, which we super-glue to the fish's scales or skin. To implant in a mouse, we make an incision in the skin, insert the IIS and sew up.
The A3035 is designed for short periods of measurement distributed over a long-term experiment. When we restrict ourselves to acceleration only, the A3035 can provide continuous, long-term recording in rats. The A3035's shelf life is the time it can remain inactive on the shelf use no more than 10% of its battery life. Its operating life is the length time it can transmit when starting with a fresh battery. To conduct an intermittent long-term experiment in a mouse, we might implant the A3035W1 and record three-axis acceleration and three-axis rotation for an hour a day at 128 SPS for thirty-three days. To conduct a long-term, continuous experiment in rats, we might implant the A3035E0 and record three-axis acceleration continuously for seven weeks at 64 SPS. We use the Neurorecorder to record all our IIS measurements to disk. We use the Neuroplayer to play the recording and add up the total operating time for us automatically.
[03-OCT-24] The table below lists the existing versions of the Implantable Inertial Sensor (IIS). The data channel numbers we specify with an offset from the device identifier number. Full range is 0-65536 as transmitted by the device, in units of "counts" or "cnt" for short. We subtract 32768 cnt to obtain the signed measurement range ±32767 cnt. We obtain the conversion factor from cnt to rev/s or m/s/s by dividing the dynamic range by the count range. The A3035R0, for example, provides range ±160 m/s/s, so we have 4 mm/s/s/cnt.
| Version | Volume (ml) |
Mass (g) |
Battery Type |
Battery Capacity (mAhr) |
Operating Life (hrs) |
Shelf Life (mo) |
Data Channels |
|---|---|---|---|---|---|---|---|
| A3035R0 | 0.80 | 1.6 | CR1216 | 30 | 110 | 4 | 0-2: accelerometer x, y, z, ±160 m/s/s, 64 SPS |
| A3035A1 | 0.95 | 1.8 | CR1225 | 48 | 40 | 6 | 0-2: accelerometer x, y, z, ±160 m/s/s, 128 SPS 3-5: gyroscope x, y, z, ±5.6 rev/s, 128 SPS |
| A3035B1 | 0.95 | 1.8 | CR1225 | 48 | 150 | 6 | 0-2: accelerometer x, y, z, ±160 m/s/s, 128 SPS |
| A3035F0 | 1.3 | 2.5 | CR1620 | 80 | 280 | 10 | 0-2: accelerometer x, y, z, ±160 m/s/s, 64 SPS |
| A3035H1 | 1.3 | 2.5 | CR1620 | 80 | 67 | 10 | 0-2: accelerometer x, y, z, ±160 m/s/s, 128 SPS 3-5: gyroscope x, y, z, ±5.6 rev/s, 128 SPS |
| A3035E0 | 2.6 | 5.8 | CR2330 | 255 | 910 | 35 | 0-2: accelerometer x, y, z, ±160 m/s/s, 64 SPS |
| A3035D1 | 2.6 | 5.8 | CR2330 | 255 | 210 | 35 | 0-2: accelerometer x, y, z, ±160 m/s/s, 128 SPS 3-5: gyroscope x, y, z, ±5.6 rev/s, 128 SPS |
The A3035H1 provides 128 sixteen-bit samples of each of x, y, and z linear acceleration, and x, y, and z angular velocity. The total number of samples per second is 6 × 128 = 768 SPS. Active current consumption while implanted in an animal at 37°C is 1.2 mA. Its CR1620 battery provides 80 mA-hr capacity. Operating life is 80 mAhr / 1.2 mA = 67 hr. The A3035F0 provides 64 sixteen-bit samples each of x, y, and z linear acceleration. Its total number of samples per second is 3 × 64 = 192 SPS. Quiescent current is 280 μA at 37°C. Its CR1620 battery provides 290 hours operating life. The A3035B1 provides 128 SPS of x, y, and z linear acceleration. Quies ent current is 310 μA at 37°C. Its CR1225 battery provides 48 mAhr, or 150 hrs operating life. All versions consume slightly less than 1 μA when turned off.
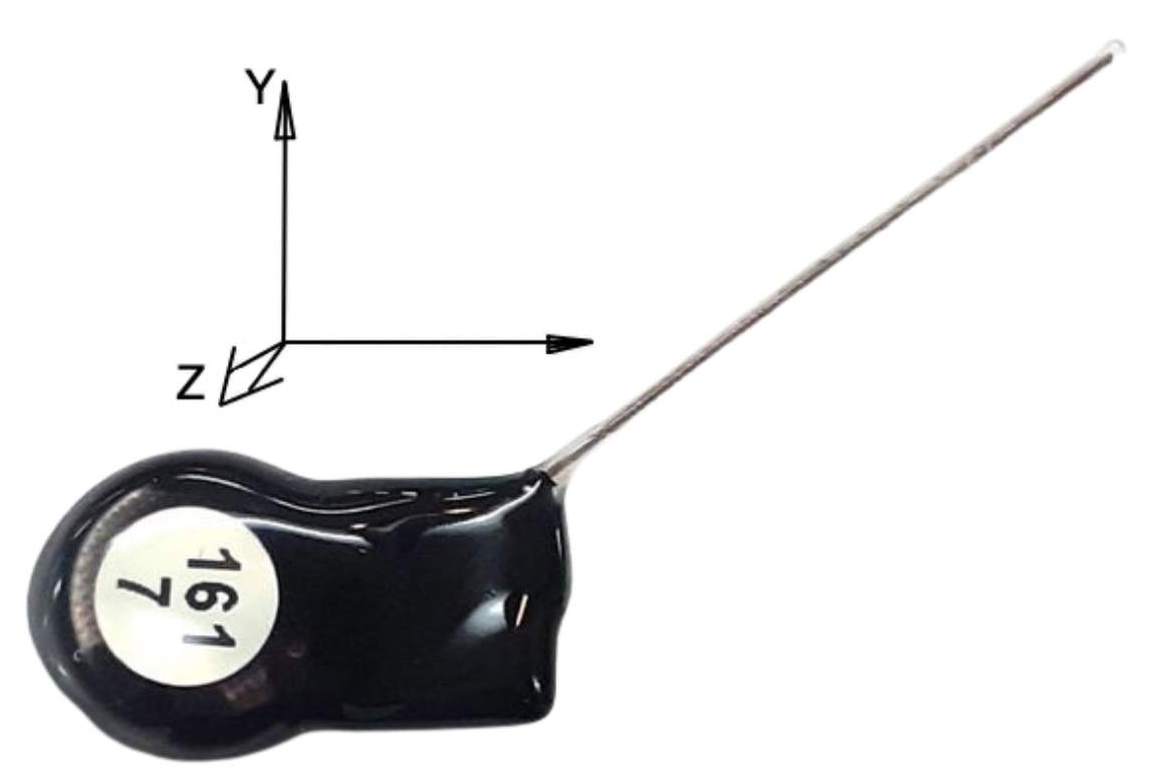
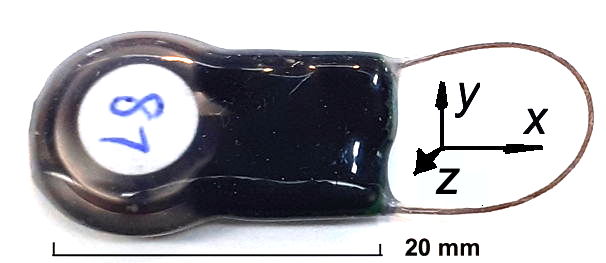
[25-JUL-22] The A3035 angular velocity and acceleration measurements are defined with respect to the device coordinate system, which remains fixed with respect to the body of the device. We indicate the directions of the device coordinate axes in the reference photograph for each device version. Look in the version table for these photographs, here is an example. The coordinate system is always right-handed. When we show only two of the axes in the photograph, the third may be deduced from the other two. A rotation about an axis is positive if it is clockwise looking in the direction of the axis.
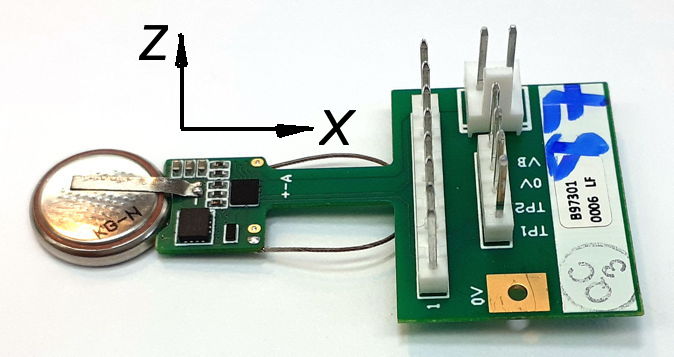
In the orientation shown above, with the circuit stationary, the accelerometer will report acceleration of +9.8 m/s/s in the z-direction. The other five measurements will be close to zero.
The sensors themselves use their own coordinate systems. There is the gyroscope coordinate system and the accelerometer coordinate system. The firmware running in the A3035 exchanges and negates these coordinates so as to bring all measurements into the device coordinate system.
[09-FEB-24] The A3035A1 provides both 128 SPS accelerometer and 128 SPS gyroscope. It consumes 1.15 mA when running, and ≤1.0 μA when stopped. We calculate its operating life by dividing its battery capacity by 1.15 mA. We calculate its shelf life by dividing battery capacity by ten, and then dividing by 1 μA. The A3035B1 provides 128 SPS accelerometer an no gyroscope signal. It consumes 260 μA when running and ≤1.0 μA when stopped.
During an experiment, we keep track of how many hours the IIS has been operating for by examining our telemetry recordings. Thee telemetry system is designed to run continuously, whether there are transmitters running or not. If we launch a Neurorecorder and leave it running, it will record our IIS and SCT signals when they exist, but it will always record clock messages, so that recording archives will be written to disk according to a strict schedule. We can launch a Neuroplayer at any time, select the OpLife.tcl processor and play our recordings. The processor will add up operating time of all transmitters it encounters and report to its text window. See the comments in the script for details.
[14-JAN-20] The A303501A needs the following modifications.
[09-FEB-24] The A3035AV1 needs the following modifications for use in the A3035BV1.
[24-OCT-24] For details of the design and development of the A3035, see its Design page.
{kind=link}