| Description |
| Ordering |
| Versions |
| Analog Inputs |
| Thermometer |
| Battery Voltage |
| Battery Life |
| Implantation |
| Synchronization |
| Encapsulation |
| Design |
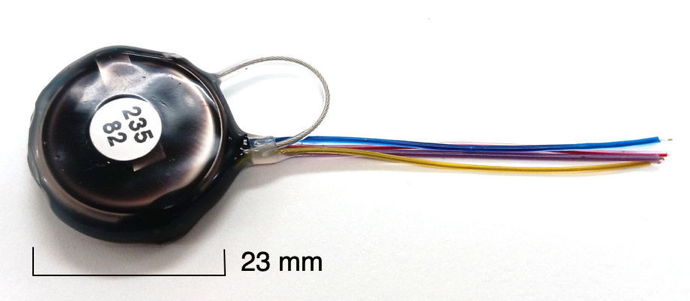
[19-NOV-25] The A3047 Subcutaneous Transmitter (SCT) is an implantable telemetry sensor for small animals. It provides amplification and filtering for up to four independent biopotentials as well as a body temperature measurement. When equipped with a CR2330 battery, its mass is 6.7 g, making it suitable for implantation in adult rats. All versions of the A3047 operate within our Telemetry System. All of them turn on and fof with a magnet.

The A3047 Subcutaneous Transmitter can be equipped with as few as two and as many as eight leads for detecting biopotentials. All versions are equipped with a loop antenna in addition to the leads. One lead is always a low-impedance ground connection, which we call GND. This lead is always blue. Channel X4 uses the GND lead as its reference potential. The ground lead anchors the potential of the transmitter to the animal body. We must attach the ground lead to some part of the host animal. The cerabellum is a popular ground potential location because we can anchor the ground lead to the skull, which stops the ground potential being corrupted by movement artifact. Amplifiers X1, X2, and X3 each have two input connections Xn+ and Xn−. We can connect these to two points in the animal body to measure an independent potential, or we can leave one of them disconnected, in which case there will be no lead present for that input, and the A3047 amplifier will connect that disconnected input to GND. We can have four amplifiers sharing the same GND reference potential, or we can have four amplifiers with separate reference potentials, or some combination of the two.

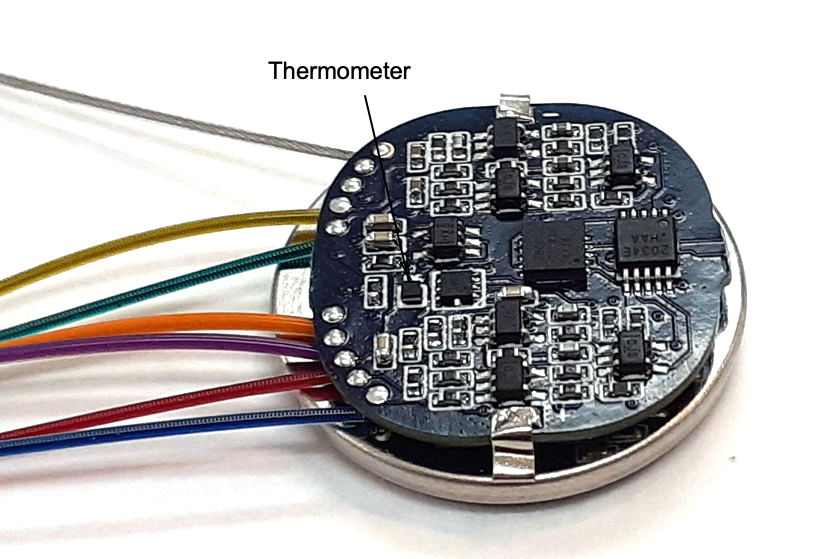
The thermometer loaded on the A3047 Subcutaneous Transmitter thermometer is on the bottom side of the circuit board, opposite the battery. It's absolute accuracy is ±1.0°C and its stability and precision are better than ±0.1°C. With a one-point calibration at 37°C, the absolute accuracy improves to ±0.1°C. We use a processor like this in the Neuroplayer to translate the A3047's sixteen-bit output into a temperature, after which we can subtract an offset to obtain a calibrated measurement.
The A3047 Subcutaneous Transmitter transmits on up to five telemetry channels. Each analog input uses one channel and the thermometer, if enabled, uses one channel. These channel numbers will always be consecutive. The first channel number we call the base channel number. The label on the device will specify a batch number and the base channel number. The other telemetry channels are those immediately following the base channel number. The base channel number can be even or odd. All versions of the A3047 are covered by a one-year warranty against corrosion and manufacturing defect.
[06-JUN-25] There are many possible configurations of the A3047 Subcutaneous Transmitter. Each configuration becomes an established "version" when we manufacture it for a customer. We list the available versions in the section below. You will find our latest prices in our Price List. To determine which SCT is best for your application, feel free to consult the OSI Chatbot. To obtain a quotation for manufacture and delivery, or to ask us questions directly, please email us at info@opensouresintruments.com.
[15-DEC-25] The following versions of the A3047 Subcutaneous Transmitter are defined. We define new versions upon request. The full part number is of the form "A3047VnG-L", where capital letter V specifies the battery, number n specifies the sample rates of the four channels, capital letter G specifies the bandwidth and gain of each channel, capital letter L specifies the configuration of the leads. We use the table below to translate VnG codes into transmitter characteristics. The L code we present a separate Leads table. The operating life is the minimum time for which a newly-made transmitter will operate continuously. The shelf life is the time the transmitter can remain turned off in storage and still retain 90% of its operating life. For each analog input we specify the bandwidth, sample rate, input dynamic range in millivolts, and channel number offset. The channel number offset is the value we add to the base channel number of the device to obtain the channel number of the signal.
| Version | X1 Passband, Sample Rate, Dynamic Range |
X2 Passband, Sample Rate, Dynamic Range |
X3 Passband, Sample Rate, Dynamic Range |
X4 Passband, Sample Rate, Dynamic Range |
T | Battery Capacity (μA·d) |
Vol- ume (ml) |
Mass (g) |
Oper- ating Life (d) |
Shelf Life (mo) |
|---|---|---|---|---|---|---|---|---|---|---|
| A3047A1A | Disabled | 0.16-80 Hz, 256 SPS, 60 mV, CH=0 |
0.0-40 Hz, 128 SPS, 30 mV, CH=1 |
0.0-160 Hz, 512 SPS, 60 mV, CH=2 |
128 SPS, CH=3 |
11000 (CR2330) |
3.2 | 6.7 | 72 | 36 |
| A3047A1B | Disabled | 2-80 Hz, 256 SPS, 60 mV, CH=0 |
0.0-40 Hz, 128 SPS, 120 mV, CH=1 |
0.0-160 Hz, 512 SPS, 120 mV, CH=2 |
128 SPS, CH=3 |
11000 (CR2330) |
3.2 | 6.7 | 72 | 36 |
| A3047A2C | 0.0-80 Hz, 256 SPS, 120 mV, CH=0 |
0.0-80 Hz, 256 SPS, 120 mV, CH=1 |
0.0-80 Hz, 256 SPS, 120 mV, CH=2 |
0.0-80 Hz, 256 SPS, 120 mV, CH=3 |
Disabled | 11000 (CR2330) |
3.2 | 6.7 | 72 | 36 |
| A3047A3D | 2-80 Hz, 128 SPS, 30 mV, CH=0 |
2-80 Hz, 256 SPS, 60 mV, CH=1 |
0.0-20 Hz, 64 SPS, 120 mV, CH=2 |
0.0-160 Hz, 512 SPS, 120 mV, CH=3 |
64 SPS, CH=4 |
11000 (CR2330) |
3.2 | 6.7 | 72 | 36 |
| A3047B4E | disabled | 0.0-80 Hz, 256 SPS, 120 mV, CH=1 |
0.0-80 Hz, 256 SPS, 120 mV, CH=2 |
0.0-80 Hz, 256 SPS, 120 mV, CH=3 |
Disabled | 3750 (CR2016) |
2.4 | 4.3 | 31 | 12 |
The sample rate of any one A3047 Subcutaneous Transmitter input must be an even power of two. Furthermore, if the inputs have different sample rates, the total sample rate must also be an even power of two. These restrictions are necessary to avoid cross-talk between the amplifiers and synchronous noise generated by the logic. If we try to make a transmitter with sample rates 512 SPS, 256 SPS, 128 SPS, and 64 SPS, we will see sustained, synchronous noise at 64 Hz of amplitude up to 10-40 μVpp in all four channels. We can, however, make a three-input version with the same sample rate on all three inputs.
For each analog input we specify the bandwidth, sample rate, dynamic range, and channel number offset. In terms of ADC counts, the dynamic range is always 0-65535, as produced by the A3047's sixteen-bit ADC. The zero-value of an input is the sample we obtain when we short the input to its reference potential. The zero-value depends upon the battery voltage, VB, according to zero-value = 1.8 V · 65535 / VB. The dynamic range is the battery voltage divided by the gain of the amplifier. When we specify dynamic range, we assume VB = 3.0 V, which is true for almost the entire life of the lithium batteries we use with the A3047 Subcutaneous Transmitter. When the amplifier gain is 100, the dynamic range is 30 mV and spans −18 mV to +12 mV.
For the thermometer, we specify the sample rate and the channel number offset. All thermometers provide the same accuracy and precision. We read out and digitize the temperature measurement with a fourteen-bit ADC. We add two zeros to the end of the fourteen-bit value to obtain a sixteen-bit value. The quantization step four our temperature measurement is four sixteen-bit ADC counts. The sensitivity of the digitized value to temperature is −5.25 mK/cnt. Because the minimum chnage in the sixteen-bit ADC value is four counts, the resolution of the thermometer is four times the magnitude of the sensitivity, or 0.021°C.
See the Battery Life chapter of our telemetry manual for an explanation of how operating life of A3047-family SCTs varies mass and sample rate. In almost all cases, we set the sample rate of an input equal to 3.2*B, where B is the bandwidth in Hz. This sample rate makes it possible for the low-pass filter to provide 20 dB attenuation at one half the sample rate, which is 1.6*B. Frequencies above one half the sample rate will be distorted by sampling, but the 20-dB attenuition ensures that such signals do not corrupt the signal we record from the SCT's passband.
| Code | X1+ | X1− | X2+ | X2− | X3+ | X3− | X4+ | GND | Antenna |
|---|---|---|---|---|---|---|---|---|---|
| A | None | None | Yellow 100 mm B-Lead A-Coil |
Green 100 mm B-Lead A-Coil |
Orange 100 mm B-Lead A-Coil |
Purple 100 mm B-Lead A-Coil |
Red 200 mm B-Lead A-Coil |
Blue 200 mm B-Lead A-Coil |
Clear 50 mm A-Ant |
| B | Pink 130 mm B-Lead Q-Ferrule |
None | Yellow 130 mm B-Lead Q-Ferrule |
None | Orange 130 mm B-Lead A-Coil |
None | Red 130 mm B-Lead A-Coil |
Blue 130 mm B-Lead A-Coil |
Clear 50 mm A-Ant |
| C | Pink 200 mm B-Lead P-Coil |
Brown 200 mm B-Lead P-Coil |
Yellow 100 mm B-Lead P-Coil |
Green 100 mm B-Lead P-Coil |
Orange 100 mm B-Lead P-Coil |
Purple 100 mm B-Lead P-Coil |
Red 200 mm B-Lead A-Coil |
Blue 200 mm B-Lead A-Coil |
Clear 50 mm A-Ant |
| D | Pink 200 mm C-Lead A-Coil |
Brown 200 mm C-Lead A-Coil |
Yellow 100 mm C-Lead A-Coil |
Green 100 mm C-Lead A-Coil |
Orange 100 mm C-Lead A-Coil |
Purple 100 mm C-Lead A-Coil |
Red 200 mm C-Lead A-Coil |
Blue 200 mm C-Lead A-Coil |
Clear 50 mm A-Ant |
| E | Pink 200 mm C-Lead A-Coil |
None | Yellow 200 mm C-Lead A-Coil |
None | Orange 200 mm C-Lead A-Coil |
None | Red 200 mm C-Lead A-Coil |
Blue 200 mm C-Lead A-Coil |
Clear 50 mm A-Ant |
| F | None | None | Yellow 45 mm C-Lead A-Coil |
None | Orange 45 mm C-Lead A-Coil |
None | Red 45 mm C-Lead A-Coil |
Blue 45 mm C-Lead A-Coil |
Clear 30 mm D-Ant |
See our Electrode Catalog for a list of available lead terminations, and also for a presentation of the various depth electrodes to which these terminations can be attached. See our Leads Table for a description of our several types of insulated, coile steel spring leads. See our Antennas table for a description of the various types of antenna we can deploy on our implants.
[15-DEC-25] The A3047 Subcutaneous Transmitter has nine pads for wires. One is reserved for the radio-frequency antenna. The other eight are analog inputs. The antenna lead is a stranded stainless steel wire insulated with clear silicone and tied in a loop. Its tip is joined to the base of the GND lead on the opposide side of the transmitter by a heat shrink sleave and a silicone coating. The GND lead is always present, and must be connected to the host animal somewhere.

We specify for each analog input its absolute dynamic range, which is the difference between the high and low potentials at which the amplifier saturates. The table below gives these high and low potentials for each standard A3047 Subcutaneous Transmitter input dynamic range.
| Range (mV) | Low (mV) | High (mV) |
|---|---|---|
| 30 | -18 | 12 |
| 60 | -36 | 24 |
| 120 | -72 | 48 |
| 150 | -90 | 60 |
| 300 | -180 | 120 |
The GND lead is the low-impedance ground potential for the amplifier inputs. The X1, X2, and X3 amplifiers will use GND as their reference potential if we leave their inverting inputs, X1−, X2−, and X−, disconnected. The A3047A2C-B is an example of an A3047 Subcutaneous Transmitter in which all four amplifiers use GND as their reference. The A3047A2C-B SCT requires only five leads.
During our final quality control, we measure the frequency response of every A3047 Subcutaneous Transmitter amplifier. We apply a sinusoidal to all inputs and plot the amplitude of the transmitted signal versus frequency. You will find a database of such plots here. When we drop a transmitter in water and we allow the water to settle until it is still, we will see on our analog inputs the sum of two electrical signals. One is electrical noise generated by the transmitter circuit. The other is chemical noise generated by the electrode metals reacting with the water. With 316SS electrodes, no solder joints, the chemical noise is negligible. Analog inputs with dynamic range 30 mV will see roughly 5 μV of electrical noise in the range 1-160 Hz.
In the figure below, we are driving each input of an A3047A3D-C SCT with a 15-mVpp square wave. The step response of the amplifiers reveals not only the amplifier gain but also its passband. We test DC transmitters with slow square waves to confirm that they respond down to 0.0 Hz.
In the following figure, we are driving each input of an A3047A1A-A Subcutaneous Transmitter with a 50-mVpp triangle wave. The triangle wave drives the X3 into saturation on both sides of the dynamic range, and drives X2 and X4 close to their limits. As the figure shows, the amplifiers are able to drive their outputs right to the positive and negative supply voltages. We see the X3 signal clipped on top and bottom, and also distorted after emerging from saturation. The current consumption of the amplifiers rises when their outputs are saturating. If, during the course of a DC recording, the amplifier output drifts out of range and saturates, its current consumption will increase from around 2 μA to 50 μA, which will causes a significant decrease in operating life. It is important, therefore, to make sure that our DC transmitters have sufficient dynamic range to accommodate the largest galvanic potentials our electrodes are going to generate during the course of a long recording.
Each of the amplifiers X1-X4 are equipped with non-inverting and inverting inputs so as to permit a differential voltage measurment. The X4 inverting input is always GND, and GND must always be connected to the host animal's body. If we make no connection to the inverting input of the other three amplifiers, they will also use the GND potential as their inverting input. If we connect both inverting and non-inverting inputs to the same signal, their difference is zero, and the ideal amplifier output will be equal to the zero-value. Our amplifiers are not ideal, as we demonstrate with the following experiment. We connect X4+ and GND of an A3047A1A Subcutaneous Transmitter to the ground of our signal generator. We connect X2+, X2−, X3+, and X3− together and drive them all with the same 20 mVpp sine wave to measure the common mode gain of X2 and X3. We then connect X2− and X3− to GND to measure the differential gain. We divide the differential gain by the common mode gain to obtain the common mode rejection ratio (CMRR). We vary the frequency of the sinusoid to obtain the following plot of CMRR versus frequency.
For common-mode signals below 7 Hz, common-mode signals will be attenuated at least a factor of one hundred. In the recording below, we have an A3047A1B-A Subcutaneous Transmitter immersed completely in a beaker saline. The X3 leads are on one side of the beaker and the X4 leads are on the other side. After a while, we see a chemical artifact on X4. This artifact is generated by a galvanic reaction on the metal at the exposed end of either the X+ or the GND lead. During the artifact, the X4 potential drops by 70 mV in a few seconds and returns to zero in two minutes. The potential of the saline with respect to the GND electrode must drop by 35 mV and recover in two minuts. So we have a 35-mV common-mode signal applied to the X+ and X− electrodes on the other side of the beaker. The drop in X3 is less than 10 μV, suggesting CMRR of roughly 80 dB for slow artifacts like these.
The distortion of a signal by an SCT is the extent to which the SCT alters the shape of its sinusoidal components. We apply a 20 mVpp sinusoid to X1 (0.0-160 Hz, 60 mV) and X3 (0.0-40 Hz, 120 mV) of an A3047BV2 Subcutaneous Transmitter. We vary the frequency from 0.25 Hz to 200 Hz. For each frequency, we obtain the spectrum of the signal and measure the power outside the sinusoidal frequency as a fraction of the sinusoidal power using this script. We express the result in parts per million.
The distortion of the X is dominated by random electronic noise. As we leave the pass-band of each amplifier, we see the apparant distortion increase because the amplifier's low-pass filter is attenuating the input. We see a second harmonic in the spectrum of a sixteen-second interval, as shown below, but the amplitude of this harmonic is below the maximum amplitude specified by our function generator, so it could be a genuine feature of our input signal.
The A3047 Subcutaneous Transmitter samples its signals uniformly, thus eliminating the scatter noise present in earlier transmitters such as the A3013, A3019, and A3028.
[15-DEC-25] The A3047 thermometer is on the bottom side of the board, on the opposite side from the battery. When we implant the A3047 Subcutaneous Transmitter, the most natural orientation of the device is to place the battery facing outwards. The thermometer faces inwards, with epoxy and silicone between it and the animal's body temperature. The absolute accuracy of the thermometer is ±1°C and its precision is better than ±0.1°C. The temperature signal consists of sixteen-bit sample values that decrease with increasing temperature. A typical A3047 temperature signal consists of 64 samples per second (SPS) on its own dedicated telemetry channel.
To obtain one temperature measurement per second, we take the average value of all sixty-four samples in a one-second interval. We can do this in the Neuroplayer with the help of an interval processor. We convert the average sample value for the interval into temperature using a straight-line fit centered on our region of interest, which is most likely the body temperature of a rat or mouse. According to our calibration of a batch of A3047A3D transmitters, the average sample value at 37.0°C is 39200 cnt and the average slope of temperature with sample value is −5.34 mK/cnt. Noise on the one-second average measurement is around 4 cnt rms, which is 0.02°C.
When exporting from NDF to EDF in the Neuroplayer, we write into the EDF header a minimum and maximum value for temperature that directs our EDF viewer to provide an accurate translation of the raw measurements in the temperature range we are most interested in studying. In the case of animal body temperature, we set the temperature at the minimum measurement value to be 209.5°C and the temperature at the maximum measurement value to be −140.5°C, and we will get a conversion that is close to correct near body temperature..

Using the above configuration of the Exporter we obtain the plots below of three voltage signals and temperature, derived from our EDF_Demo.zip example recording. The EDF file contains the original sixteen-bit temperature samples. We can edit the EDF file header to adjust our low-sample and high-sample temperature values if we find that our thermometers are in error in our region of interest. When we perform this adjustment, we should keep the low and high sample values separated by the same quantity: 350.0°C. If we find that our thermometers are measuring, on average, 1°C too high, we raise both the low-sample and the high-sample calibration points by 1°C.

The thermometer on the A3047 Subcutaneous Transmitter is the LMT70, a 0.9-mm square component on the bottom side of the transmitter circuit. The battery is loaded on the top side. When implanted, the thermometer is separated from the animal's body by approximately one millimeter thickness of epoxy and silicone. The speed with which the thermometer responds to changes in ambient temperature is dominated by the heat capacity of the transmitter. For the A3037A, with its CR2330 battery, the time constant is one minute in water, as shown by the plots below.
So long as you have an accurate thermometer, performing a one-point calibration of a batch of A3047 Subcutaneous Transmitter thermometers is straightforward, because we can turn them all on and put them in a large caraf of hot water with our reference sensor. When the water cools to our temperature of interest, we record the average values of the temperature signals. We can use these values, along with the slope −5.34 mK/cnt, to calibrate our thermometers to within ±0.05°C in a ±5°C range.
[18-JUN-25] We refer you to the Battery Voltage chapter of our Telemetry Manual for a discussion of how we can measure an A3047's battery voltage during operation.
[18-MAR-26] The standard versions of our A3047 Subcutaneous Transmitter are equipped with non-rechargeable lithium coin cells. We are also willing to make non-standard versions, such as non-magnetic SCTs with lithium-polymer batteries, but these have far lower capacity than the lithium coin cells. Under almost all circumstances, the lithium coin cell is the best choice. The operating life of an A3047 how long it can amplify and transmit its input voltages when starting with a fresh battery. The shelf life of an A3047 is how long it can wait on the shelf in its sleep state before it has used 10% of its battery capacity. We specify the minimum operating life and shelf life of A3047-family SCTs in the A3047 Version Table. We provide a detailed discussion of SCT operating life in the Battery Life chapter of our Telemetry Manual. Here we present tables and measurements specific to the A3047 family.
| Total Sample Rate (SPS) |
CR1620 3300 μA·d |
CR2025 6700 μA·d |
CR2330 11000 μA·d |
CR2450 22000 μA·d |
CR2477 42000 μA·d |
|---|---|---|---|---|---|
| 128 | 69 | 148 | 243 | 485 | 926 |
| 256 | 51 | 110 | 181 | 362 | 692 |
| 512 | 34 | 73 | 120 | 241 | 459 |
| 960 | 22 | 46 | 76 | 152 | 289 |
| 1024 | 20 | 44 | 72 | 144 | 275 |
| 2048 | 11 | 24 | 40 | 80 | 152 |
| 4096 | 6 | 13 | 21 | 42 | 81 |
The active current consumption of A3047 Subcutaneous Transmitter increases linearly with sample rate, but also varies from one A3047 to another. For each version of the A3047, there is a maximum active current that we will accept during quality control. The minimum operating life of this SCT is its nominal battery capacity divided by its maximum active current. To see how we calculate the maximum active current of a particular version, see the Battery Life chapter of our Telemetry Manual.
[15-DEC-25] See our Surgical Protocols page for our recommended electrode and sensor implantation procedures. See the Implantation chapter of our Telemetry Manual for a discussion of animal body mass, sensor mass, and a other details of implantation.
[17-JUN-25] When we want to mark in our recordings the time at which some event took place, such as the start of a video recording or the moment a stimulus was delivered, we can use an auxiliary SCT to add a synchronizing signal to our recording. See the Synchronization chapter of the Telemetry Manual for details.
[29-NOV-23] All versions of the A3047 Subcutaneous Transmitter are encapsulated in black epoxy and coated with silicone. The silicone is "unrestricted medical grade" MED-6607, meaning it is approved for implants of unlimited duration in any animal, humans included. The A3047's leads and antenna are encapsulated with dyed silicone, then coated with the same unrestricted medical grade silicone. The only materials the transmitter and its leads present to the host animal's body are either unrestricted medical grade silicone or stainless steel. When we solder screws or pins to the ends of the leads, there is also solder. Solder reacts slowly with saline, so solder joints must be protected from body fluids by an insulating layer of cement during implantation.
[09-JUN-25] For design files and development logbook, see the A3047 Subcutaneous Transmitter design and development page at D3047.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}